class: center, middle, inverse, title-slide .title[ # Lecture 5 ] .subtitle[ ## Joints, Levers, and Linkages<br>Muscles ] .author[ ### Dr. Christopher Kenaley ] .institute[ ### Boston College ] .date[ ### 2025/28/1 ] --- class: inverse, top # Joints, Levers, and Linkages ``` ## Warning: package 'ggplot2' was built under R version 4.2.3 ``` ``` ## Warning: package 'kableExtra' was built under R version 4.2.3 ``` <!-- Add icon library --> <link rel="stylesheet" href="https://cdnjs.cloudflare.com/ajax/libs/font-awesome/5.14.0/css/all.min.css"> .pull-left[ Today we'll .... - Consider joints - Consider linkages - Muscles moving levers - MP1 and AMEs open floor ] .pull-right[ <br> <iframe width="560" height="315" src="https://www.youtube.com/embed/pDU4CQWXaNY" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> ] --- class: top # How do skeletal elements permit predictable movement? ## How many degrees of freedom? .pull-left[ - `\(M=6-c\)` - 6 possible DOF - c=constraints  ] .pull-right[ 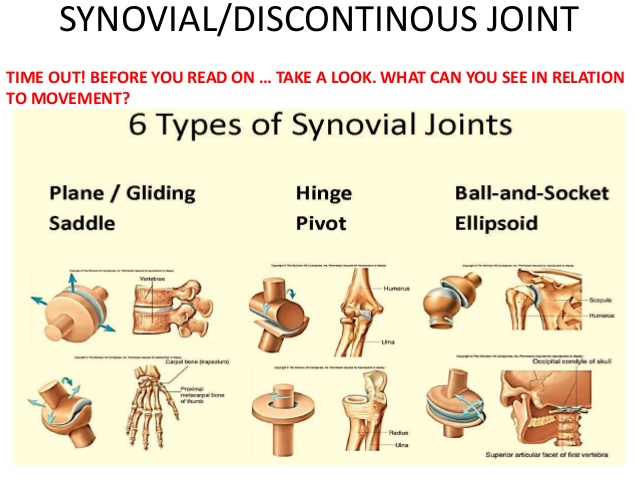 ] --- class: top # How do skeletal elements permit predictable movement? .center[ ## Arthroidal membrane ] .pull-left[  ] .pull-right[  ] --- class: top # Synovial joints: The knee, for example .pull-left[ - cruciate ligaments constrain motion - wring causes weeping lubrication - coeff. friction = 0.003 - good ball bearings =0.02 ] .pull-right[ <img src="img/knee.jpg" width="350" /> ] --- class: top # Joints are fulcrums: thus, we move with levers .pull-left[ <img src="img/thirdorder.png" width="450" /> ] .pull-right[ In equilibrium net moment (torque)=0 `$$F_{out}L_{out}=F_{in}L_{in}$$` Mechanical advantage (MA): `$$\frac{F_{out}}{F_{n}}=\frac{L_{in}}{L_{out}}$$` Speed ratio (gearing): `$$\frac{L_{out}}{L_{in}}$$` ] --- class: top # Lever types and examples 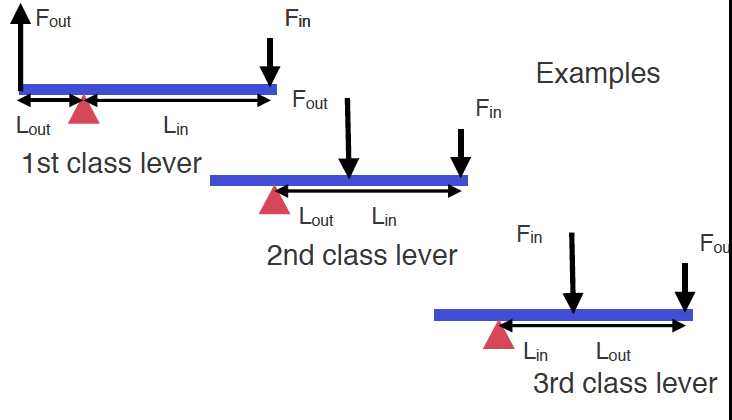 --- class: top # Trade offs in action .center[ <img src="img/limblevers.png" width="550" /> Which limb belongs to a fast runner? A digger? ] --- class: top # Levers are part of a postural system .center[ <img src="https://cob.silverchair-cdn.com/cob/content_public/journal/jeb/208/9/10.1242_jeb.01520/3/jeb01520f2.jpeg?Expires=1739879067&Signature=RUZdZOHRcnMl-AkGrQXrGO6WtkMBYxUmzr9~gem2OdPtEkHJDGh~s3NoC4LkQC5~6CLLvuYlUUyJ723kYafKukbaFRaXbCkXF~B7EBtXsK82bUPZkTdBOIFs8BSxvNyrSrKiJ7nAtf0wzIdWEttfGSp6~~BHRkWA~UMTAnJ53F8aMgiGd3fm1hkRaVKNIUpQOhJ~xmACKVenPJMp8jARtCpnRUdXTVJF-OTWe71KbBjXbYgDrtvxuo-uWhekTVYkEjHPIP8BL5umauXwVxU2aCOCKOVRSEZTgfQkeC34f7U3zsNPBF7SzZHOBlYGhLZylPDyuvAsaD-NOICcoQre6A__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA" width="250" /> ] .footnote[ `$$EMA=r/R$$` ] --- class: top # Linkages ## 4-bar linkage .pull-left[ ### Can predict KE and ME based on morphology: - Force amplification = `\(r/q\)` - Speed ampflication = `\(q/r\)` ] .pull-right[ 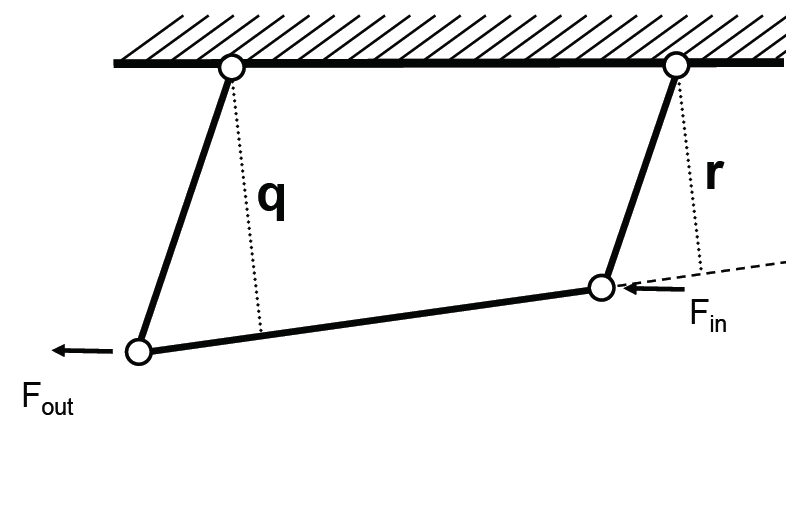 ] --- class: top # Linkages .center[ ### Famous 4-bar from fish <img src="img/fish4bar.jpg" width="550" /> ] --- class: top # Muscles ``` ## Warning: package 'scales' was built under R version 4.2.3 ``` <!-- Add icon library --> <link rel="stylesheet" href="https://cdnjs.cloudflare.com/ajax/libs/font-awesome/5.14.0/css/all.min.css"> .pull-left[ Next we'll consider .... - How muscles produce force (i.e., tension) - What predicts the amount of force (length, time, velocity) - How muscles function ] .pull-right[  ] --- class: top # Muscles generate mechanical work and power. How? .center[ <img src="img/muscle.jpg" width="550" /> ] --- class: top # Muscles generate mechanical work and power. ## How? .center[ <img src="img/sarcomere.jpg" width="400" /> ] --- class: top # Muscles generate mechanical work and power. ## How? .center[ <img src="img/filamenttheory.png" width="350" /> ] .footnote[ Sliding filament (crossbridge) theory. Gordon, Huxley & Julian (1966)] --- class: top # What determines amount of force produced by muscle? .pull-left[ 1. Time after activation ] .pull-right[ <img src="img/latent.jpg" width="450" /> ] --- class: top # What determines amount of force produced by muscle? .pull-left[ 1. Time after activation 2. Muscle (sarcomere) length <br> <br> <img src="img/filiments.jpg" width="550" /> ] .pull-right[ <br> <br> <br> <br> <img src="img/forcelength.png" width="550" /> ] --- class: top # What determines amount of force produced by muscle? .pull-left[ 1. Time after activation 2. Muscle (sarcomere) length 3. Shortening velocity <br> <img src="img/forcevel.png" width="550" /> ] --- class: top # What determines amount of force produced by muscle? .pull-left[ 1. Time after activation 2. Muscle (sarcomere) length 3. Shortening velocity <br> <img src="img/forcevel.png" width="550" /> ] .pull-right[ V=? to maximize power? `$$P=F\times V$$` <br> <br> <img src="https://d3i71xaburhd42.cloudfront.net/2b0ce8ae4ce7e28430b71ba8983e33c3bad9c196/3-Figure2-1.png" width="550" /> ] --- class: top # What determines amount of force produced by muscle? .pull-left[ 1. Time after activation 2. Muscle (sarcomere) length 3. Shortening velocity <br> <img src="img/forcevel.png" width="550" /> ] .pull-right[ Formalize F-V relationship... the Hill equation: `$$\frac{T}{T_o}=T^\prime=\frac{1-\frac{v}{v_{max}}}{1+c\frac{v}{v_{max}}}=\frac{1-v^\prime}{1+cv^\prime}$$` <img src="https://d3i71xaburhd42.cloudfront.net/2b0ce8ae4ce7e28430b71ba8983e33c3bad9c196/3-Figure2-1.png" width="550" /> .footnote[ `\(c\approx 1.2-4\)` ] ] --- class: top # Metrics of muscle function ## Generate mechanical work and power .pull-left[ - Work = `\(F\cdot\Delta L\)` (Joules) - Power = Work/time (Joles/s = Watts) - Power = Work x Frequency (Joules/s = Watts) - Power = F x V (Joules/s = Watts) <br> ] .pull-right[ <br> <img src="img/musclework.png" width="250" /> .footnote[ ] ] --- class: top # Metrics of muscle function ## The work loop technique .pull-left[ - Work = `\(F\cdot\Delta L\)` (Joules) - Power = Work/time (Joles/s = Watts) - Power = Work x Frequency (Joules/s = Watts) - Power = F x V (Joules/s = Watts) .center[ <img src="img/muscletest.png" width="60" /> ] ] .pull-right[ <br> <img src="img/workloop.png" width="200" /> .footnote[ ] ] --- class: top # Metrics of muscle function .center[ <img src="img/motorbreakstrut.png" width="600" /> ] --- class: top # Lots more to study We know we don't know a lot about muscles .center[ <img src="https://s3-eu-west-1.amazonaws.com/s3-euw1-ap-pe-ws4-cws-documents.ri-prod/9780367190811/central/musclefuels/images/gastrocnemius.jpg" width="400" /> Doublet potentiation ] --- class: top # Lots more to study We know we don't know a lot about muscles .center[ <img src="https://www.frontiersin.org/files/Articles/128285/fncel-09-00081-HTML/image_m/fncel-09-00081-g001.jpg" width="400" /> Doublet potentiation ] --- class: top # Lots more to study We know we don't know a lot about muscles .center[ <img src="https://www.researchgate.net/profile/Stanley-Salmons/publication/11155153/figure/fig5/AS:276867023163394@1443021650100/Mean-nFTIpP-n-6-for-doublets-lower-surface-triplets-intermediate-surface-and.png" width="400" /> ] --- class: center, middle # Thanks! Slides created via the R package [**xaringan**](https://github.com/yihui/xaringan).